|
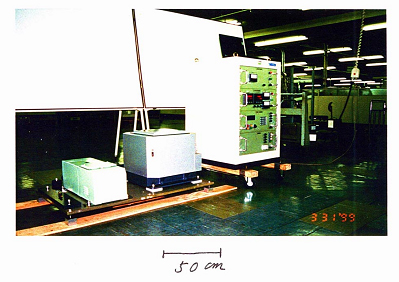
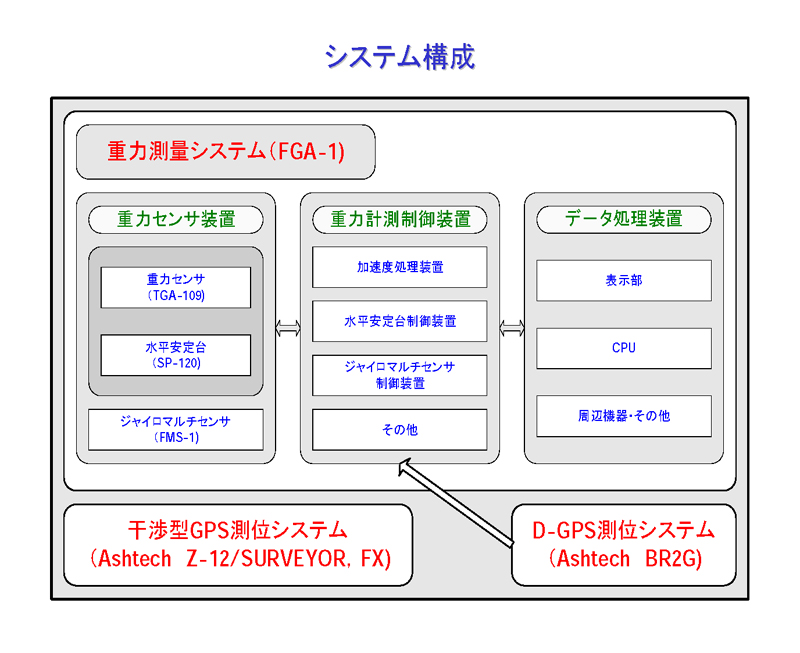
筆者等は1995年以来航空重力測定システムの開発を行なってきた.はじめ固定翼機を使用して実験を行なっていたが1998年よりヘリコプター重力計の開発に切り換えた.これの成功の陰には1998年より2000年までのNEDO(新エネルギー産業技術総合開発機構)の支援があったことを付記する. ヘリコプターはGPSによる高度に従って一定高度を飛行するので,楕円体高飛行となり,高度補正をした重力値は正規重力値との差から「重力乱れ(Gravity Disturbance:楕円体面上の重力異常)」を与える.一方,フリーエア重力異常はジオイド上の値なので,両者を比較する場合はジオイド高の影響を考慮する事を忘れてはいけない. 図2にヘリコプター重力測定システム(Segawa Model)の外観を示す.それは3つのブロックに分かれ,図3のように重力センサー装置,重力計測制御装置,データ処理装置よりなる.ヘリコプターの位置測定はリアルタイムの制御用DGPSと後処理型の干渉GPSの双方で行なわれる.図4にはヘリコプター重力測定のデータ処理法を示す.生データは鉛直加速度と水平加速度,及び3次元位置データである.これらのデータを処理し,時定数数分のローパスフィルター(Lowpass Filter)をほどこし,最終的に飛行高度(通常2000フィート)における重力異常を求める.正規楕円体面上の重力乱れを求めるには下方接続(Downward Continuation)をしなければならない. |
   |
(C) Copyright 2004 The Geodetic Society of Japan. All rights reserved.