|
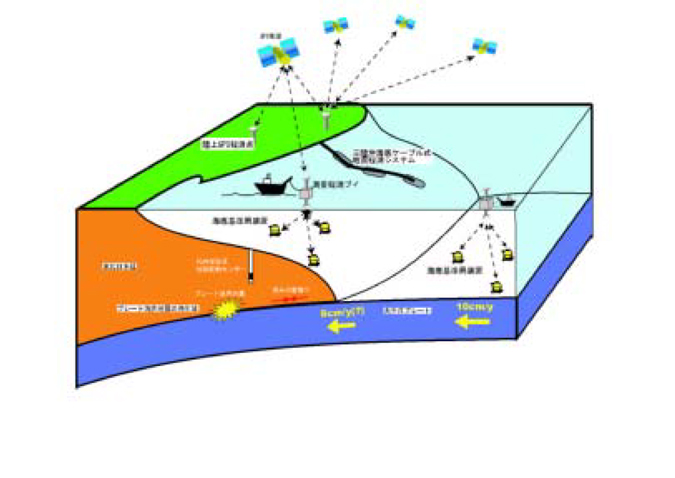
海上のGPS測位と海中の音響測距を結合することにより,海底の精密測位が可能になってきた(図4).原理は従来の音響測位と同じであるが,測位精度が3桁以上向上している.その要因の1つは揺れる船などにおける精密測位であり,陸上のGPS観測点を基準として移動体の測位を行うキネマティックGPS測位の成果である.約2週間後に得られるGPS衛星の精密軌道情報を用いると,陸から数100km離れた海上で1-2cmの測位精度が得られる.残る2つの要因は,海底地殻変動観測(2)で述べた精密音響測距の実用化と,音速変化の影響に対する補正方法の改良である. 海上局として用いる船やブイには3-4台のGPS受信機と音響測距装置を装備する.比較的平坦な海底を選び,10-12kHzの音響信号を受信して送り返す海底局(音響測距装置)を3-4台設置する.海底局の周辺でGPS測位と音響測距を長時間行うとともに,海中の音速構造の情報を得るために,温度と塩分濃度の鉛直分布の測定を並行して行う.航海後,海上局の位置を求め,音響測距と音速構造のデータを解析して,海底局のアレイの重心位置を求める.海底局の相対位置は変わらず,音速構造は水平成層構造をなしていると仮定して解析することが多い.普通はこの仮定はよく成り立っており,音速構造の変化が水平方向の測位に与える影響のかなりの部分を除去できる. この観測を何年か繰り返すと,陸上のGPS観測点を基準にした海底局のアレイの位置は変化していく.この変化は,水平方向の海底地殻変動そのものである. |
 |
(C) Copyright 2004 The Geodetic Society of Japan. All rights reserved.