|
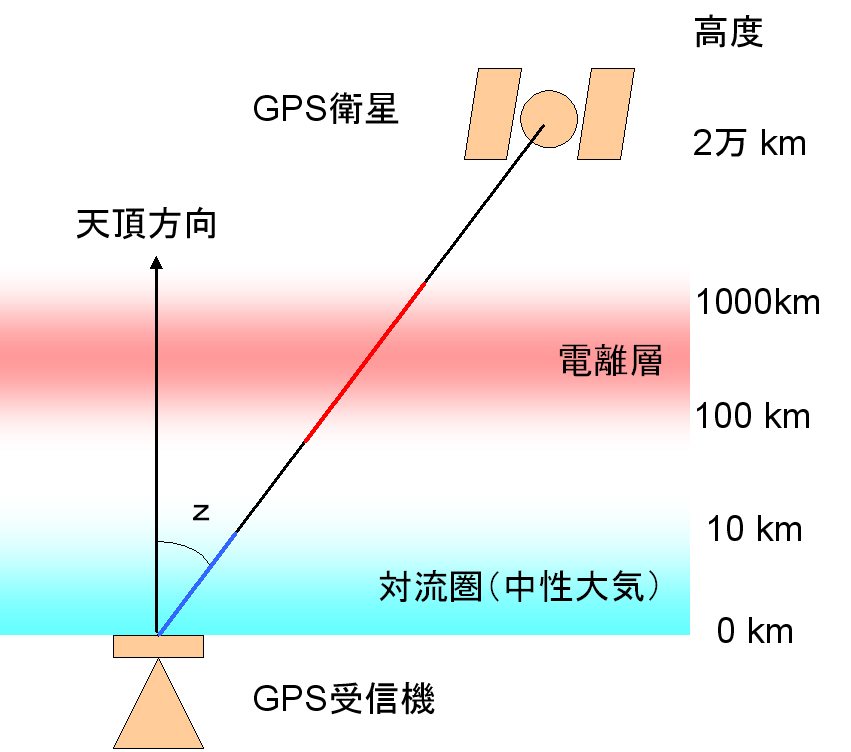
GPS測量では,各衛星を出発したマイクロ波(約1.2GHz及び1.6GHz)が受信機に到達するまでに伝播した時間(距離)を測定し,各衛星の位置を基準にして,受信機の位置を求める.マイクロ波は,地表付近で電離層や対流圏に遭遇するが(図2),このとき,屈折率の関係で速度や経路が変化して伝搬が遅れ,距離測定に影響を及ぼす.天頂方向の遅延量は,電離層で1〜10m程度,対流圏で2.5m程度であるが,衛星の天頂角z が大きくなるにつれて遅延量も概ね1/cos(z )の割合で大きくなるので,補正が必要である[3]. 電離層遅延は,マイクロ波の周波数に依存するので,2周波データの組み合わせにより消去できる.しかし(周波数に依存しない)対流圏遅延は残るので,適切な理論式により補正するか,未知パラメータとして推定する必要がある. 大気の物理に関する考察から,様々な対流圏遅延の理論式が作られているが,いずれも天頂方向の遅延量に,天頂角(仰角)に依存するマッピング関数をかけた形で表される.通常のGPS測量では,こうした理論式を用いて対流圏遅延を補正する.相対測位なので,距離が短ければ各観測点での遅延量はほぼ相殺され,そこそこに良い測位精度が得られる.しかし,最高精度が要求される地殻変動観測では,各点の天頂方向の対流圏遅延量を,例えば3時間毎に一定値としてモデル化し,それらも座標と一緒に最小二乗法により推定する.この際,対流圏遅延は短い時間では余り変化しないので,時間変化に拘束条件をつけることもある.さらに,これを発展させた手法が,対流圏遅延の時系列を確率過程として取り扱い,カルマンフィルターによって解く手法である[4]. このような工夫により測位精度は向上するが,それでも推定された対流圏遅延量と座標の上下成分(高さ)との間には高い相関があり,対流圏遅延が厄介な誤差要因であることに変わりはない.例えば,現実の大気状態とマッピング関数との矛盾は,高さに系統誤差を与えてしまうであろう. |
 参考文献 [3] GPSの教科書を参照のこと.例えば, Leick, A.(2004): GPS Satellite Surveying, 3rd ed., John Wiley & Sons, p.435. Seeber, G.(2003): Satellite Geodesy, 2nd ed., Walter de Gruyter, p.589. [4] 大谷竜,内藤勲夫(1998):GPS可降水量の物理と評価,気象研究ノート,第192号,15-33. |