1.キネマティックGPSの原理 2.仮想基準点方式 3.キネマティックGPSの応用
|
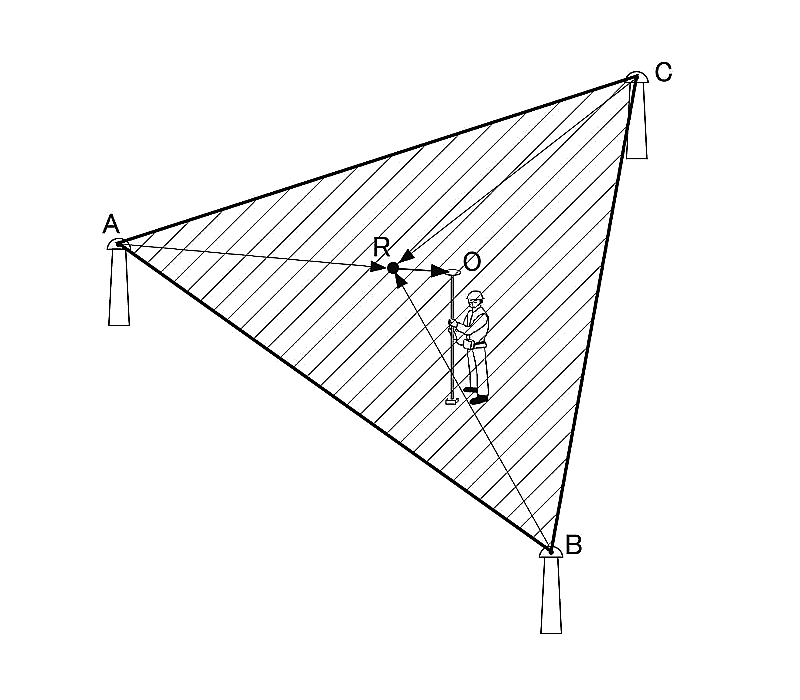
最近,仮想基準点方式と呼ばれる迅速・高精度な測位方法が登場した.この方式は必ずしも移動体測位だけのための方式ではないが,実質的にキネマティックGPSの応用技術と言ってよいだろう.前記のキネマティックGPSでは位置のよくわかっている基準点を各自で設置する必要があった.日本列島のGEONETのようにGPS観測網のインフラが整備されている地域では,このような基準点を独自に準備する必要はない.観測点の位置座標を得る際に,その点をとりまく3基準点から内挿によって観測点近傍の任意の点での搬送波位相を推定してしまい,それを基準として観測点の位置を前記のキネマティックGPSによって求めることができる(図2).このような方式が仮想基準点方式である.GEONETの基準点からの1秒データは商業ベースで配信されており,作業者は携帯電話などによって観測点の任意の近傍からの補正データを取得することにより,簡単に観測点位置を2〜3cm程度の精度で推定することが可能である.主として測量の効率化のために導入された方式であるが,火山体など局所的かつ数cmを超える大きな変位の期待できるような場所では,簡便でかつリアルタイムの位置推定方法として利用価値があると思われる. |
 |
(C) Copyright 2004 The Geodetic Society of Japan. All rights reserved.